Kirjeldus
* Suurem pöördemoment mahutab rohkem PV-mooduleid kulude vähendamiseks
* Kaks tõukevaia ja kaks fikseeritud tugipunkti konstruktsiooni tugevuse suurendamiseks, mis suudavad vastu seista suurematele välisjõududele ja koormustele
* Elektriline sünkroonjuhtimine muudab jälgija täpseks ja tõhusaks, väldib mehaanilisest sünkroonimisest põhjustatud ajamite asünkroonsust ning vähendab sellest tulenevaid moonutusi ja mehaanilise struktuuri kahjustusi
* Mitmepunktiline iselukustuv kaitse muudab konstruktsiooni stabiilseks, mis talub suuremat väliskoormust
* Iga jälgija alalisvoolu võimsus on suur, vähem mehaanilist struktuuri mahutab rohkem päikesemooduleid
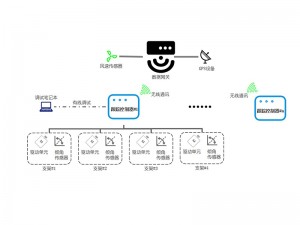
* Kasutage kogu süsteemi juhtimiseks ühte Synwelli jälgimiskontrollerit, suurendades stabiilse töö tagamiseks rohkem kaitserežiimi
* Kasutatakse koos traditsioonilise ühe draivi jälgijaga, et vastata erinevate fotogalvaaniliste alade piiride paigutusnõuetele
| Komponentide paigaldamine | |
| Ühilduvus | Ühildub kõigi PV moodulitega |
| Moodulite kogus | 104 ~ 156 (kohanemisvõime) , vertikaalne paigaldus |
| Pinge tase | 1000VDC või 1500VDC |
| Mehaanilised parameetrid | |
| Sõidurežiim | DC mootor + pöörded |
| Korrosioonikindel klass | Kuni C4 korrosioonikindel disain (valikuline) |
| Sihtasutus | Tsemendi- või staatilise survevaivundament |
| Kohanemisvõime | Maksimaalselt 21% põhja-lõuna suunaline kalle |
| Maksimaalne tuule kiirus | 40m/s |
| Võrdlusstandard | IEC62817,IEC62109-1, |
| GB50797, GB50017, | |
| ASCE 7-10 | |
| Juhtimisparameetrid | |
| Toiteallikas | Vahelduvvoolu / stringi toiteallikas |
| Raevu jälgimine | ±60° |
| Algoritm | Astronoomiline algoritm + Synwelli intelligentne algoritm |
| Täpsus | <1° |
| Varjuvastane jälgimine | Varustatud |
| Suhtlemine | ModbusTCP |
| Võimsuse oletus | <0,07kwh/päevas |
| Gale kaitse | Mitmeastmeline tuulekaitse |
| Töörežiim | Käsitsi / automaatne, kaugjuhtimispult, madala kiirgusega energiasäästlikkus, öine äratusrežiim |
| Kohalik andmete salvestamine | Varustatud |
| Kaitseaste | IP65+ |
| Süsteemi silumine | Juhtmeta+mobiilterminal, arvuti silumine |
-
Paindlik tugiseeria, suur vahekaugus, kahekordne kabiin...
-
Kahe kihiga fikseeritud tugi, 800–1500 VDC, bifacial ...
-
PV-moodul, G12 vahvel, bifacial, vähem võimsust...
-
Intelligentne juhtimissüsteem, Synwell Intelligence...
-
Professionaalne insener pakub kohandatud lahenduse...
-
Ökonoomne juhtimissüsteem, vähem Ebose kulusid, neli...